Human-robot interaction in structured environments has been made incredibly safe over the past few years. In these cases, the environment is controlled to ensure human safety. However, many spaces such as disaster zones, construction sites, and more are unstructured. There is a need to develop scientific principles that ensure human safety in these environments as well. The ROAMR project (PI, Dr. Anirban Mazumdar, DART Lab and Co-PI, Dr. Aaron Young), proposes the use of wearable robotics to quickly alert the user to threats, recognize the user’s intent, and assist in agile movement to ensure the human user is safe.
Lab members:
Aakash Bajpai
Carlos Carrasquillo
Collaborators:
Dr. Ani Mazumdar
Related work:
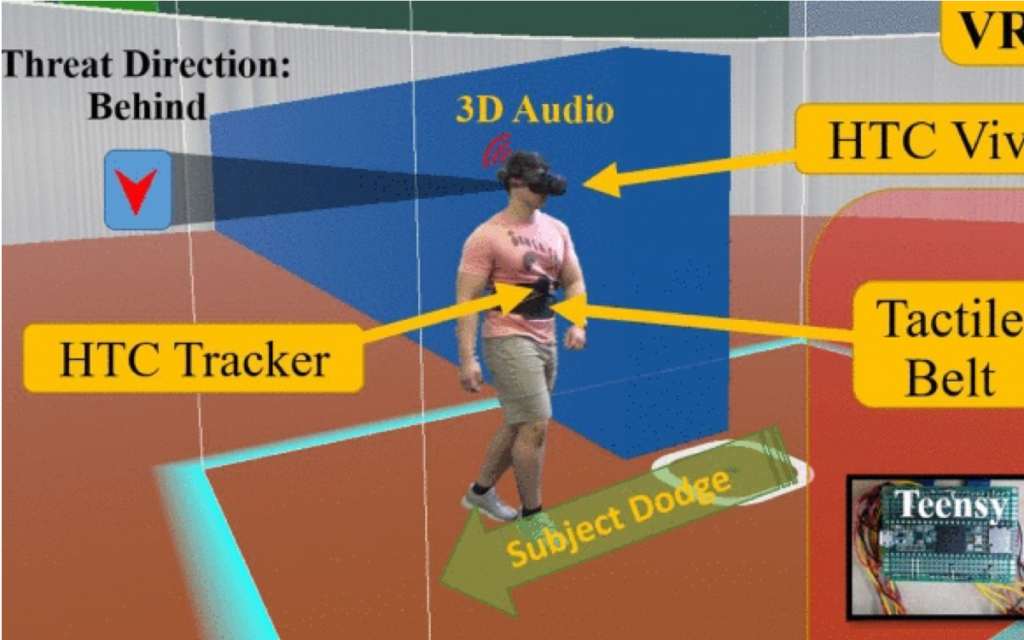
Aakash Bajpai, Justine Powell, Aaron Young, Ani Mazumdar, “Enhancing Physical Human Evasion of Moving Threats Using Tactile Cues,” IEEE Transactions on Haptics, Volume 13, Issue 1 (2020) pp. 32-37. (DOI) (Video)
Aakash Bajpai, Karen Feigh, Anirban Mazumdar, Aaron Young, “Influencing Human Escape Maneuvers with Perceptual Cues in the Presence of a Visual Task,” IEEE Transactions in Human Machine Systems, Volume 51, Issue 6 (2021) pp. 715-724. (DOI)
Pooja Moolchandani, Anirban Mazumdar, Aaron Young, “Design of an Intent Recognition System for Dynamic, Rapid Motions in Unstructured Environments,” ASME Letters for Dynamic Systems and Control, Volume 2, Issue 1 (2022), pp. 011004. (DOI)