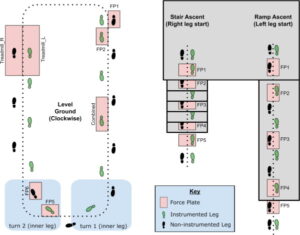
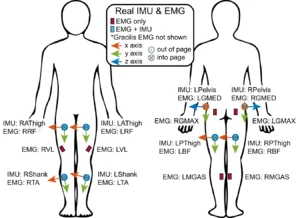
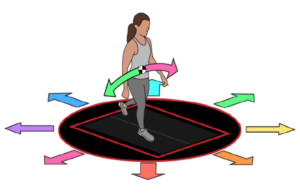
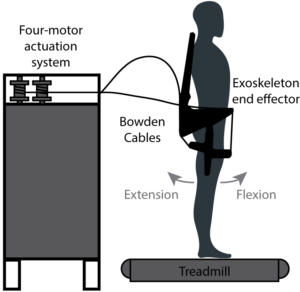
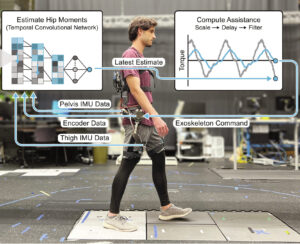
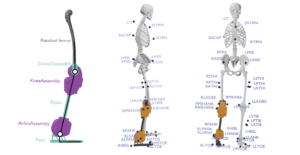
DataSets lower limb biomechanics in stairs, ramps, and level-ground ambulation and transitions (Carmargo, 2021) 22 Participants Force Plates, Inertial Measurement Units, Goniometers, Lower Body Motion Capture Level-ground, Treadmill, Ramps, Stairs Lower Limb Biomechanics and Wearable Sensors Dataset During Cyclic and Non-cyclic activities (Scherpereel, 2023) 12 ParticpantsProcessed Inverse Kinematics & Dynamics, Inertial Measurement Units, Electromyography, Simulated Sensor Set20 Non-cyclic + 11 Cyclic Tasks Exoskeleton Sensor Data & Ground truth Biomechanics for Cyclic & Non-Cyclic tasks (Monilaro & Scherpereel, 2024) 15 ParticipantsExoskeleton Wearable Sensor Data (IMU, Force Sensitive Insoles, Motor encoder data)28 Non- cyclic & Cyclic Tasks Biomechanics of locomotion during ground translation perturbations (Leestma, 2023) 11 ParticipantsWhole Body Angular Momentum, Feet and Pelvis markers, Step Placement InformationPerturbations at 3 Magnitudes, 8 Directions, 4 Onset Timings Lower limb muscle activations and metabolics from various hip exoskeleton assistance profiles(Shafer, 2022) 10 ParticipantsLower Limb Muscle Activity (Electromyography), Metabolic cost30 Exoskeleton Emulator Impedance Parameter Sets at 1.0m/s, 1.3m/s & 1.6m/s Estimating human joint moments unifies exoskeleton control, reducing user effort(Molinaro, 2024) 34 ParticipantsExoskeleton Sensor Data (Actuator Encoders, IMU), Processed Inverse Kinematics & Dynamics, Deep Learning Based Joint-Torque Estimates9 Ambulation Modes Software Tools Exoboot Machine learning based Gait Phase Estimation Model(Shepherd, 2022) Trained Gait Phase Model + IMU Transform instructions OpenSim Open-Source Leg Models(Zhou, 2022) OpenSim Model & Scaling Tools Microprocessor Prosthetic Knee Clinical Recommendation Tool Provides recommendations for microprocessor prosthetic kneesIntegrates demographic data and functional needs Epically Powerful: software and mechatronics infrastructure for wearable robotic systems (Leestma, Nathella, & Nuesslein 2025) EP handles actuators, single-board computers, and sensors without locking users into pre-determined hardware setupsEasy-to-parse Python interface