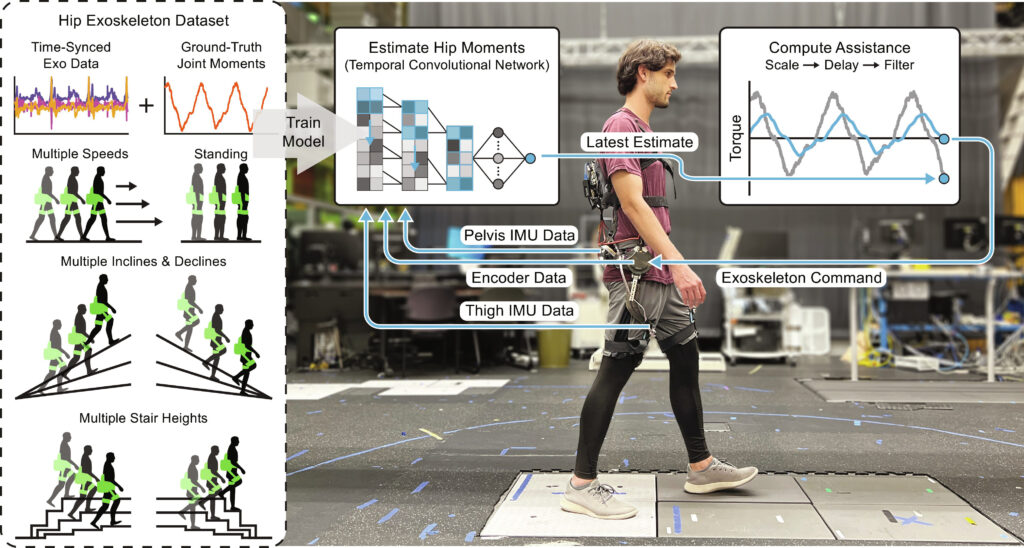
Estimating human joint moments unifies exoskeleton control, reducing user effort
Published in Science Robotics, this dataset consists of sensor data from a robotic hip exoskeleton and time-synced with ground-truth human lower-limb biomechanics. All data were sampled at 200 Hz.
34 subjects, 9 ambulation modes (e.g. level ground, ramp ascent/descent, stair ascent/decent, standing), 3 controllers (e.g. gait phase-based control based on biological torque, unified joint moment controller)
Angles and Moments computed from Inverse Kinematics
Processed sagittal plane hip, knee, and ankle angles
Processed hip and knee extension moments
Processed ankle plantarflexion moments
Exoskeleton Sensor Data
Actuators position and velocities from encoder
Acceleration and gyroscope from IMUs
Hip moment estimated by TCN
Torque commanded to actuators
Torque from the actuators (calculated by multiplying measured current by motor torque constant and gear ratio)
Gait Phase
Gait phase for each leg segmented by toe-off
Gait phase for each leg segmented by heel strike
Ground Reaction Forces
Ground Reaction forces for each foot in 3 directions