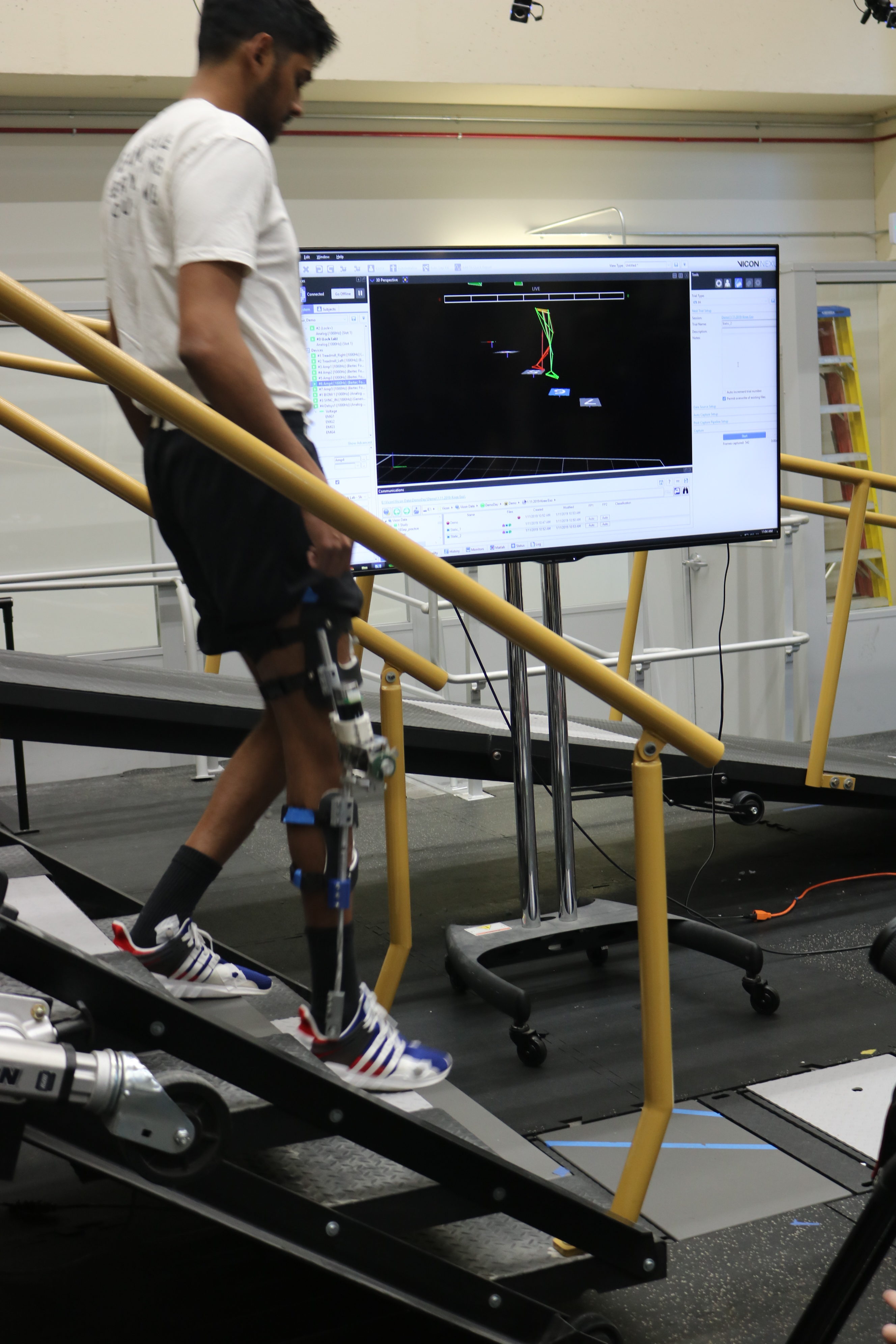
The Exoskeleton and Prosthetic Intelligent Controls (EPIC) Lab is part of the George W. Woodruff School of Mechanical Engineering, located in the Callaway building in the heart of Georgia Tech’s main campus. The EPIC Lab, led by Dr. Aaron Young, is devoted to the design and improvement of powered orthotic and prosthetic control systems. The EPIC lab has the ability to characterize robotic devices and controller implementation from the ground up, starting at fabrication and bench-top testing, to controller optimization, and ultimately, measuring the effects on human performance outcomes.
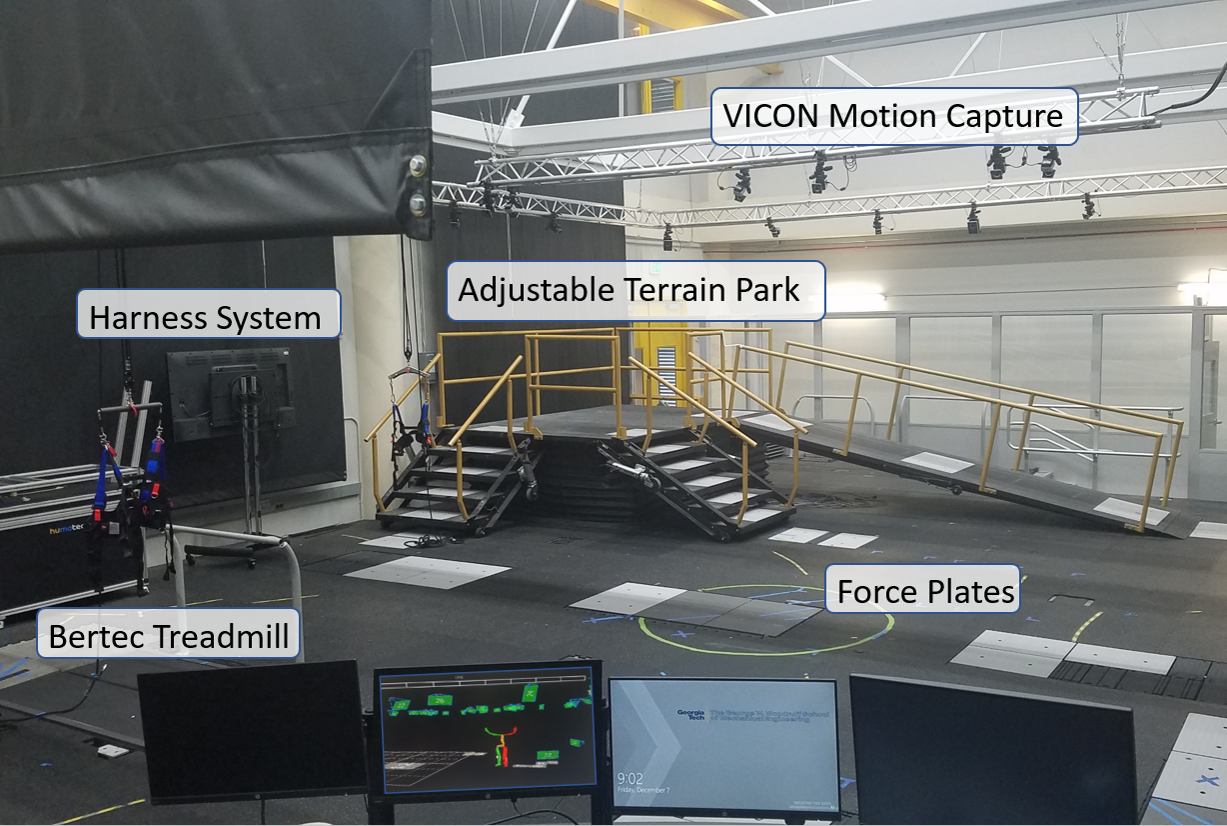
The EPIC Lab research space sports wide range of utilities including: split-belt force instrumented treadmill with incline/decline functionality (Bertec), a straight line walking path (~40 feet) with 18 possible force plate locations, a turning path configuration with an additional 14 force plate locations, six motor Bowden-cable driven lower-limb exoskeleton/prosthesis emulator system (HuMoTech), 36-camera motion analysis system (Vicon), ceiling mounted safety harness system (Biodex), a novel, custom-designed, height-adjustable terrain park, and many others!


The EPIC Lab research space also contains a Motek Computer-Aided Rehabilitation Environment (CAREN) system. The CAREN is a self-contained biomechanics lab that includes 10-camera motion analysis system (Vicon), 16 channel EMG system (Delsys), an instrumented treadmill embedded in a 6 degree-of-freedom Stewart platform, and 180° projection screen. The data from all of the equipment can be integrated in real-time using Motek’s D-Flow software, which is used to operate the CAREN system.

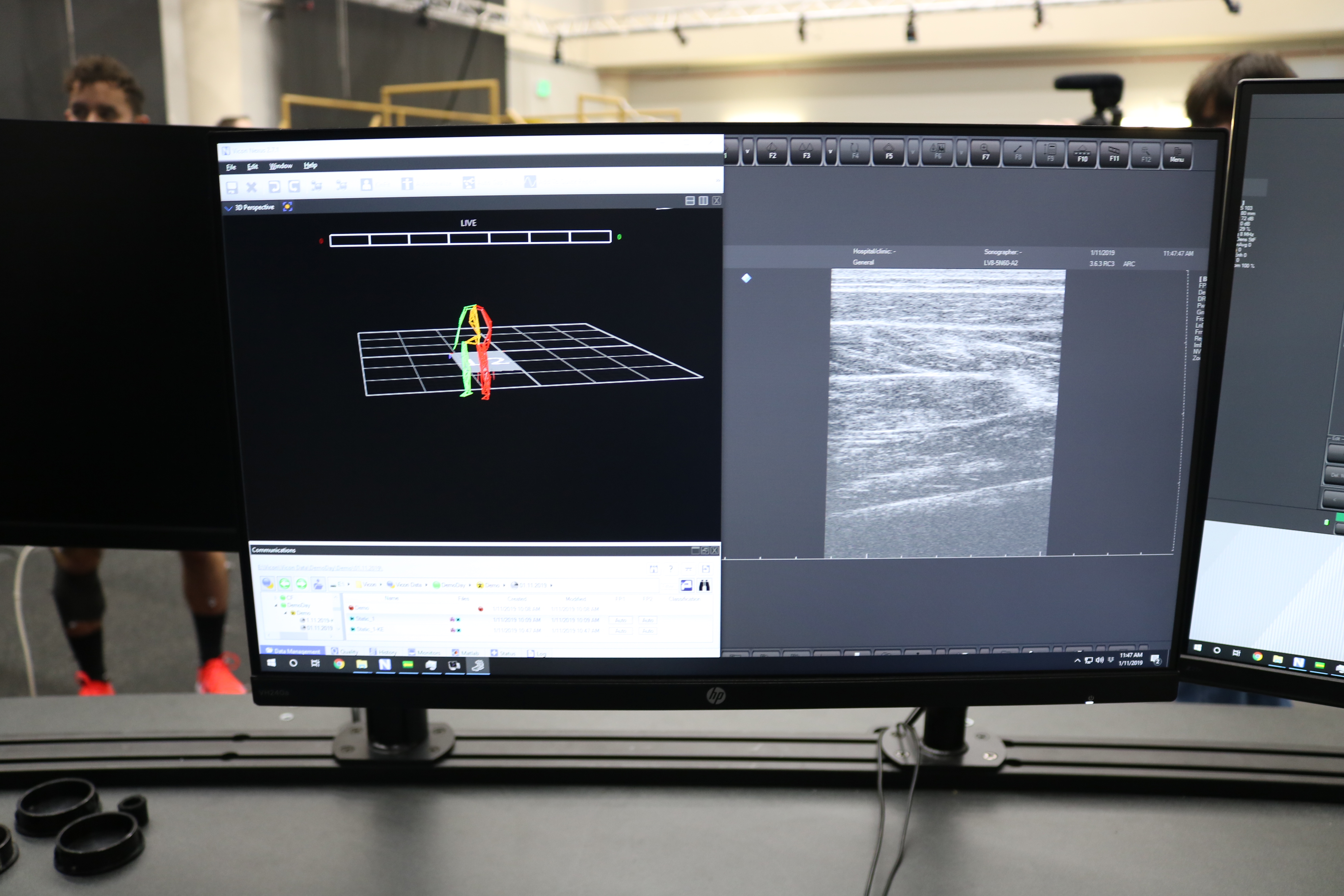
To learn more about how robotic devices affect their human users, this state-of-the-art research space is coupled with physiological measurement systems: metabolic consumption analysis (Parvo/COSMED), EMG/IMU (Delsys/Biometrics), and ultrasound (Telemed/SonixTouch). In combination, EPIC lab provides a detailed look on the mechanisms behind increased human motor performance and wearable robotic assistance.